夜間自転車を押して道路を横断中の女性を自動運転中の車両が跳ねて死亡事故となった交通事故について本ブログに2018年3月21日投稿したところですが、以下:
この事故について、NTSB(アメリカの国家安全輸送委員会)が初期調査報告書を発表しましたので報告します。原文をお読みにになりたい方は以下どうぞ:
これを全訳します:
NTSB 初期報告書 HWY18MH010
![]()
(これはあくまで初期報告書であり、今後の調査によって内容が変わることがあります)
2018年3月18日(日)21時58分頃、UBERテクノロジー株式会社の2017年製ボルボXC90の改造試験車両は、コンピューター制御モードによる自動運転試験走行を行っていたが、アリゾナ州マリコパ郡テンペのミルアベニューを北向きに走行中、歩行者を撥ねた。UBER試験車両には、44歳女性が運転席におり同乗者はいなかった。
事故現場のミルアベニュー北行は、左折レーンが2車線、直進2車線(右折レーンを含む)及び自転車専用レーンがある。衝突現場は右折レーンの入り口付近であり、街路灯があり、速度制限は45mph(約72km/h)となっていた。
事故は49歳女性がミルアベニューを東向きに自転車を押して横断している時に事故車両が衝突した(原文中図1を参照)。49歳女性は死亡、運転者に負傷はなかった。
事故現場となった付近の北行と南行のミルアベニューの中心線部分は広い車線分離帯となっており樹木とX字型のレンガ敷きのある庭園風となっており、視覚的に歩行者に横断歩道部分を渡るように注意喚起するデザインとなっている。一番近い横断歩道は、ミルアベニューとカリーロードの交差点にあり、事故現場から北に360フィート(約108m)であった。
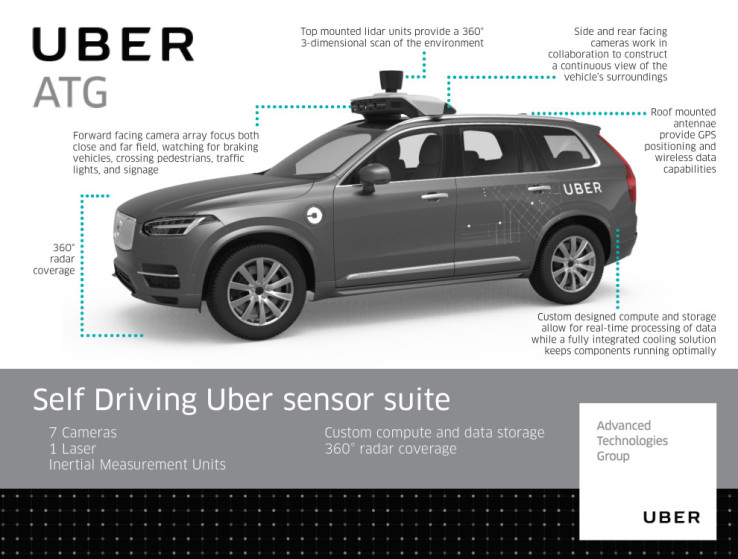
UBER試験車両は(自己改良型=ディベロップメンタル)自律式自動走行装置を装備していた。システムは前方及び側方単眼カメラ、レーダー、LIDAR*¹、navigation航法センサー(走行するための測位センサー)及び演算コンピューター、データ記憶装置から構成され、それらが統合的に搭載されている。UBER試験車両には、さらに後付のカメラシステムがウインドシールド部分とリアウインドウに取り付けられており、ビデオとして記録されるとともに運転者に前方後方の視界を提供している。走行中は総計10台のカメラビューが記録されている。
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
LIDAR*¹:Light Detection and Ranging :LIDARはレーダーのように機能するが、電波の代わりに赤外線をパルスで射出するようになっており、その反射時間を測定してどのくらいで最近接障害物に到達するかを計算する。航法(ナビゲーション)センサーはGPS(大野註:カーナビです)、イナーシャ(慣性航法装置)及び車輪回転速度をモニターする。
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
自動走行装置は地図に従って走行し、同時に速度制限を認識し走行可能な車線を選択するようになっている。またシステムは2種類の区別された制御モードから構成される:コンピューター制御モードとマニュアル制御モードである。運転者は最初からコンピューター制御モードを選択することができ、クルーズコントロール設定と同じような手順でオンにすることができる。運転者はコンピューター制御モードからマニュアル制御モードにハンドル、ブレーキ、アクセル、解除スイッチ及び無効スイッチを操作することによって変更することができる。
当該事故車両はボルボ製(VOLVO XC90)であり、いくつかの先進ドライバー支援装置が最初から装備されている。それらはドライバーの道路標識認識の有無や注意力に対する警告システムとともに、シティセイフティと呼ばれる緊急ブレーキによる障害物回避システムである。これらボルボの機能は、マニュアル制御モードのときには作動し、コンピューター制御モードのときは作動しないようになっている。
UBERによれば、ディベロップメンタル(自己改良型)自動運転装置試験中、もし自動運転装置に不具合が出た場合、確実にドライバーの介在を促するようになっているとのことである。加えて、ドライバーは車両の集中表示装置に表示される自動装置状態《診断》表示及び引き続き表示される状態表示を常時モニターすることに責任がある。
事故当夜、運転者はUBERのガレージを予め決められたテストルートへ21:14に出発した。事故発生時間には当該車両はテストコース2周目に入っており、21:39からコンピューター制御モードになっていた(すなわち スイッチオンから19分経過)。
自動運転システムから収集したデータによれば、レーダーとLIDARの記録によれば、最初に横断歩行者を認識したのは衝突6秒前であり、そのときの速度は43mph(約68.8km/h)であった。事故車両と歩行者の軌跡が交わる時(衝突時)、自動運転システムのソフトウエアは歩行者を未知の障害物と認識し、同時に次の歩行者の進行経路を予測した。衝前約1.3秒、自動運転システムは衝突衝撃軽減のため緊急ブレーキが必要と判断した(図2参照)。UBERによれば、コンピューター制御モードでの緊急ブレーキは、車体の制御(障害物からの回避など)をするものではないということだ。したがって運転者は、必要なアクションをとらなければいけなかった。(大野註:しかし、約1.3秒で運転者に何ができるでしょうか?)ともあれ自動運転システムは、運転者に対してアラート(警報)を出さないようになっていた。
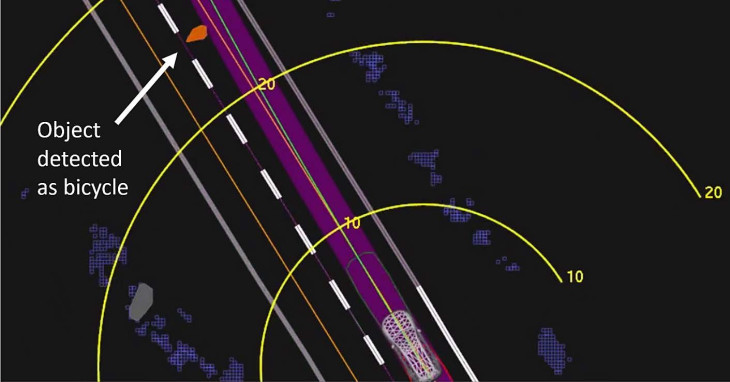
画像出典:Wikipedia NTSB 図2:衝突1.3秒前自動運転装置が衝突の衝撃を軽減するために自動緊急ブレーキが必要と判断したときのデータ解析図です。黄色の線は車両前方の距離をm(メーター)であらわしています。オレンジの線は地図上今後の予測走行軌跡です。紫の帯は車体の予定走行軌跡、緑はその中心線です。
自動走行システムのデータが示すところによれば、運転者は衝突約1秒弱前にハンドルを操作した。衝突時の速度は39mph(約62.4km/h)であった。また運転者は衝突後約1秒以下でブレーキ操作を開始した。データは衝突時に自動運転装置が全て正常に作動していたことを示しており不具合表示やそれに類するコンピューター診断はなかった。
UBERの自動運転装置には複数個のカメラが搭載されており事故を撮影していた。それらのビデオはNTSBとその調査チームによって解析された。前方ビデオカメラには歩行者が車両の進行方向に向かって歩いていく姿が映っていた。またビデオには歩行者は衝突寸前まで(気がつかなかったかのように)車体の方向を見ていないことが見て取れた。ビデオにはまた、歩行者が暗い色の衣服を着用しており、押している自転車も側方に反射板等がなかったことが記録されていた。なお自転車には前方及び後方に反射板が取り付けられており、ヘッドランプがあったが、それらは全て自転車進行方向にのみ有効なものだった。またビデオには、歩行者が道路街路灯の直接照射範囲から外れたところを横断している歩行者が記録されていた。
車内運転者を撮影したビデオは、運転者が衝突前に数回車両計器盤に目を落とす様子が映っていた。事故後の運転者に対するNTSBの調査によれば、自動運転装置インターフェイス(コンピューターの環境状態に対する反応)のモニターをしていたと語った。また運転者は、車内に私用の携帯と会社(UBER)からの携帯があったが911(日本の119番通報)に電話したときは双方とも使っていなかったとも話した。
NTSBはUBERの自動運転装置、車両のインターフェイス及び運転者の私用及びビジネス携帯の使用状況についてさらに情報を収集中である。運転者からはなんらの薬物も検出されなかった。テンペ警察は、事故時運転者には何らの健康上の問題も見受けられなかったと発表された。
NTSBは歩行者の事故時の挙動について目撃者がいないかどうか継続して探しており、もし、この事故を目撃した人がおられたらwitness@ntsb.govにコンタクトしてほしいとのことである。歩行者(死亡)の薬物検査については陽性であり、メスアンフェタミンmethamphetamine(覚醒剤)と大麻(マリワナ)が検出された。
事故についてはNTSBとして結論を導くため全ての観点からの原因調査を継続している。このためNTSBは、正確で完全な事故原因を究明するためにUBER、VOLVOの調査チーム及びアリゾナ交通当局と連携して調査を進めている。


画像出典:Wikipedia UBERのテンペでの事故はどうもこの事故だけではありませんね。



画像出典:Wikipedia 上段左:歩行者 上段右:運転者




ピンバック: UBER自動運転車死亡事故続報 | ペダル踏み間違い事故防止