前回の投稿(2022年7月17日 テスラのファントムブレーキ)で推論させていただいた2016年5月7日フロリダで発生したテスラ自動運転中の死亡事故の原因についてです。
【この事故は2016年5月7日、米国フロリダ州で発生。テスラモーターズのEV、モデルSの顧客が自動運転モードで走行中、大型トレーラーに衝突する事故を起こし、ドライバーが死亡した】
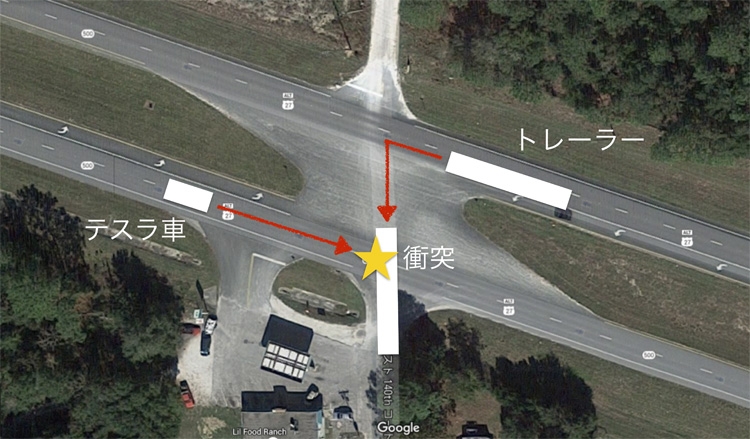
画像出典:日経ビジネス Wikipedia
いまから6年も前の記事ですが、興味深い記事を見つけたのでご紹介します(WEB日経ビジネスより):
テスラの死亡事故は「太陽のせい」か?
技術の限界を伝える難しさ

レーダーにはレーザー光を使う、いわゆるLiDAR(ライダー)と呼ばれるタイプもあるのだが、ライダーやカメラは、物体の検知に光を使うので、雨や雪などの天候では光が遮られ、測定性能が低下する。これに対しミリ波は、雨や雪の影響を全く受けないわけではないのだが、光に比べるとその影響は少なく、また空気中での減衰も光より少ないので遠くの物体までの距離を測定するのに適している。なので、まさに今回のような事故を避けるためにあるようなセンサーなのだが、ミリ波レーダーはどうして役に立たなかったのか。それが筆者の疑問だった。
クルマの側面は検知できない
そんな筆者の疑問を解いてくれたのが、自動運転車のセンサー技術に詳しいエンジニアから聞いた話だった。そのエンジニアによれば、今回の事件では「現在の運転支援システムが抱える弱点を見事なまでに突かれた」という。それはどういう意味なのか。
まずカメラについてだが、同エンジニアは「太陽の光の反射が弱かったとしても、テスラ車はトレーラーを認識できなかった可能性が高い」という。その理由は、側面からみた車両を車両だと認識するアルゴリズムが、テスラ車を含む現代のほとんどの運転支援システムには組み込まれていないからだ。もともと現在の運転支援システムは、クルマの追突を防ぐための自動ブレーキの機能から発展したものである。このため、後ろから見たクルマを認識する機能を重視している(下線部大野註)。次いで、歩行者を認識する機能、さらには自転車を認識する機能などを加える形で進化してきた。
(大野意見)これはちょっと疑問に思います。車の側面云々ではなく、カメラは人間の目と同じなので太陽が眩しくて見えないならカメラにも見えません(認識できません)。
ところで、筆者がなぜ「不条理」と感じたかといえば、テスラのオートパイロットは、カメラだけでなく、ミリ波レーダーも搭載しているからだ。確かに、太陽の光が強くて、それが白いトレーラーの側面に反射したら、人間もカメラも眩しくて、トレーラーを見つけにくいかもしれないとは思う。しかし、太陽の眩しさは、ミリ波レーダーには関係ない。ミリ波レーダーは、ミリ波と呼ばれる波長の短い電波を発射して、物体に当たって戻ってくるまでの時間を測定することで、物体の有無や、物体との距離を測定するセンサーだからだ。
レーダーで検知できなかった訳
ではカメラがダメでも、ミリ波レーダーでトレーラーを捉えられなかったのはなぜか? それは、現在のレーダーでは大面積の物体からの反射波を障害物だと認識しないように、信号が処理されているからである。トレーラーの側面は、障害物だと捉えるには大きすぎたのだ。意味が分からないという読者も多いだろう。小さすぎて認識できないというのなら分かるが、大きい物体なら認識も楽だろうと考えるのが自然だからだ。なぜ大きな物体からの反射波を認識しないようにしなければならないのか?
こうした「誤認識」を避けるために、実際のミリ波レーダーでは、ある程度以上の面積の物体からの反射波は「車両ではない」と判断して、反射波を無視するように信号を処理している。具体的には、面積の大きい物体からの反射波は出力も大きいので、ある程度以上の大きさの反射波は無視するようにしているわけだ。これが、大きな物体からの反射波を認識しないようにしている理由である。
このほかにも、路面にあるマンホールのフタからの反射波など、誤認識につながる物体は路上にたくさんある。だから、ミリ波レーダーでは、いろいろな「ノイズ」が混ざった反射波の中から、先行車両や歩行者、自転車など避けるべき障害物を検出するために、様々なフィルターをかけなければならないのだ。不幸なことに、今回のように真横になったトレーラーの側面のような物体は、現在の運転支援システムにおいては、面積が大きすぎて検出の対象外だったのである。
(大野意見)ここでいっていることは本当かなぁ? 道路上の障害物はクルマだけではない筈です。例えばトレーラーが横転して道路を塞ぐようになっていたらミリ波レーダーは認識できないのですか? それじゃミリ波レーダーを障害物認識の道具として使うのには無理があるのではないですか? ワタシが以前乗っていたプリウスはミリ波レーダーを使ったレーダークルーズコントロールを装備していましたが、トンネル内のカーブでトンネル壁を障害物と認識し、自動ブレーキがかかりました。
ワタシは依然として、2016年当時のテスラ自動ブレーキのロジックは、あまりの【誤作動の多さ】から2つの障害物認識センサーの検知結果の合致がシステム作動条件となっていたと考えています。
みなさんはどう思いますか?




トラックバックURL