ワタシは、テスラの前方障害物検知について、2016年の段階でフロリダのトレーラに突っ込んだ死亡事故を受けて投稿したものが以下です:
最近(2021年9月頃)、テスラは前方障害物検知システムの変更を行い、単眼カメラとミリ波レーダーの併用システムを止めてカメラ(単眼OR複眼?)だけにする決定を行いました。これに対して、少々古くて申し訳ありませんが、日経ビジネスの2016年7月の記事があります:
![]()
5月7日に、米テスラ・モーターズの「モデルS」が、運転支援システム「オートパイロット」の作動中に、高速道路を横切ろうとした大型トレーラーに衝突して運転者が死亡する事故を起こした。オートパイロットの作動中に運転者が死亡する事故を起こしたのは今回が初めてだ。その原因としてテスラは「トレーラーの白色の側面が、明るい空を背景としていたために(against brightly lit sky)」人間もオートパイロットもトレーラーを認識することができず、ブレーキを作動させなかったことを挙げている。
オートパイロットは、「自動操縦」というその名とは裏腹に、自動運転システムではなく、ドライバーを支援するシステムと同社は位置づけている。安全確保の義務はドライバーにあり、システムが安全に動作しているかどうかを監視するのもドライバーの役目だ。しかも、事故車のドライバーが走行中にDVDを鑑賞していた疑惑も浮上しており、テスラに対する批判的な論調は目立たない。ただ、オートパイロットがトレーラーを認識できなかった理由を空の明るさのせいにするテスラの説明に関しては、筆者は「不条理」だと感じた。
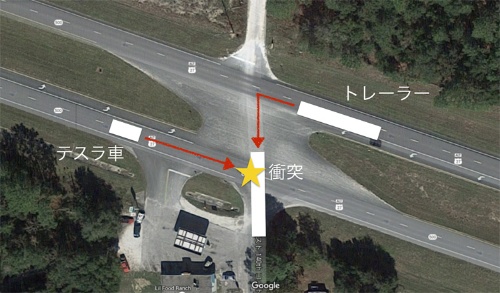
画像出典:wikipedia 日経ビジネス 事故の状況。トレーラーは左折しようとして高速道路を横断しているとき、反対車線から直進してきたテスラ車が側面に衝突した。
筆者がなぜ「不条理」と感じたかといえば、テスラのオートパイロットは、カメラだけでなく、ミリ波レーダーも搭載しているからだ。確かに、太陽の光が強くて、それが白いトレーラーの側面に反射したら、人間もカメラも眩しくて、トレーラーを見つけにくいかもしれないとは思う。しかし、太陽の眩しさは、ミリ波レーダーには関係ない。ミリ波レーダーは、ミリ波と呼ばれる波長の短い電波を発射して、物体に当たって戻ってくるまでの時間を測定することで、物体の有無や、物体との距離を測定するセンサーだからだ。
レーダーにはレーザー光を使う、いわゆるLiDAR(ライダー)と呼ばれるタイプもあるのだが、ライダーやカメラは、物体の検知に光を使うので、雨や雪などの天候では光が遮られ、測定性能が低下する。これに対しミリ波は、雨や雪の影響を全く受けないわけではないのだが、光に比べるとその影響は少なく、また空気中での減衰も光より少ないので遠くの物体までの距離を測定するのに適している。なので、まさに今回のような事故を避けるためにあるようなセンサーなのだが、ミリ波レーダーはどうして役に立たなかったのか。それが筆者の疑問だった。
クルマの側面は検知できない
そんな筆者の疑問を解いてくれたのが、自動運転車のセンサー技術に詳しいエンジニアから聞いた話だった。そのエンジニアによれば、今回の事件では「現在の運転支援システムが抱える弱点を見事なまでに突かれた」という。それはどういう意味なのか。
まずカメラについてだが、同エンジニアは「太陽の光の反射が弱かったとしても、テスラ車はトレーラーを認識できなかった可能性が高い」という。その理由は、側面からみた車両を車両だと認識するアルゴリズムが、テスラ車を含む現代のほとんどの運転支援システムには組み込まれていないからだ。もともと現在の運転支援システムは、クルマの追突を防ぐための自動ブレーキの機能から発展したものである。このため、後ろから見たクルマを認識する機能を重視している。次いで、歩行者を認識する機能、さらには自転車を認識する機能などを加える形で進化してきた。
こうした車両後面や歩行者、自転車を認識する機能は、現在商品化されている運転支援システムでは「パターンマッチング」と呼ばれる技術で実現するのが主流だ。これは、例えば人間を認識する場合であれば、人間の形状の特徴を「辞書」としてシステムに内蔵しておき、カメラが捉えた画像をこの辞書と照らし合わせ、共通するかどうかで人間かどうかを判断するという手法だ。
もちろん、実際のカメラで撮影した画像と「辞書」に登録された内容が完全に一致することはありえないから、どの程度の誤差を許容するかも併せて決めておく。それでも、歩いている人、走っている人、カバンを持っている人など、同じ歩行者といっても実際の形状は千差万別だから、「辞書」には何百、何千という歩行者の形状のパターンが記憶されている。歩行者かどうかを判別するとき、運転支援システムの内部では、いまカメラに映っている画像が歩行者かどうかを判別するために、瞬時に多数の照合作業が行われているわけだ。
同様の作業は、車両の認識や、自転車の認識でも同様に行われている。ところが、車両を横から見たところを車両かどうかを判別する技術は、現在商品化されている運転支援システムでは搭載されていない。それは照合作業があまりにも膨大になってしまうためだ。というのも、車両を後ろから見た形状に比べて、車両を横からみた形状のバリエーションは非常に多いため、そもそも「辞書」を作る作業も大変なら、「辞書」と照合する作業も膨大になり、市販車に搭載できるレベルのコストのシステムでは、実現が難しいのが実情である。つまり、横から見たトレーラーは、現在の運転支援システムでは、そもそも認識の対象から外れているのである。これが、背景がたとえ明るい空でなくても、カメラがトレーラーを認識できなかった可能性が高い理由だ。
(大野意見:これには少し疑問がある。カメラは人間の目と同じで人間の目に見えるものはカメラにも見え、人間の目に見えないものは見えない。つまり朝日が凄かったのだろう)
レーダーで検知できなかった訳
ではカメラがダメでも、ミリ波レーダーでトレーラーを捉えられなかったのはなぜか? それは、現在のレーダーでは大面積の物体からの反射波を障害物だと認識しないように、信号が処理されているからである。トレーラーの側面は、障害物だと捉えるには大きすぎたのだ。意味が分からないという読者も多いだろう。小さすぎて認識できないというのなら分かるが、大きい物体なら認識も楽だろうと考えるのが自然だからだ。なぜ大きな物体からの反射波を認識しないようにしなければならないのか?
それは、実際の路上には、大面積の物体があまりにも多く存在するからである。現在の運転支援システムに使われているミリ波レーダーは、物体の位置が左右方向のどこにあるかはある程度判別できるが、その分解能はかなり低い。また上下方向の分解能は事実上ない。このため、もしあらゆる物体からの反射波をまともに認識していると、例えば高速道路の上方に取り付けてある案内板からも反射波を受けることになり、衝突する物体もないのに、車両にブレーキがかかるということになりかねない。
こうした「誤認識」を避けるために、実際のミリ波レーダーでは、ある程度以上の面積の物体からの反射波は「車両ではない」と判断して、反射波を無視するように信号を処理している。具体的には、面積の大きい物体からの反射波は出力も大きいので、ある程度以上の大きさの反射波は無視するようにしているわけだ。これが、大きな物体からの反射波を認識しないようにしている理由である。
(大野意見:そうかな~? ミリ波レーダーを装備している私のトヨタミライは、面積の大きい前方障害物でよくピーピーなるし、トヨタプリウスの時も千葉のトンネルカーブで緊急ブレーキがかかったことがあります)
このほかにも、路面にあるマンホールのフタからの反射波など、誤認識につながる物体は路上にたくさんある。だから、ミリ波レーダーでは、いろいろな「ノイズ」が混ざった反射波の中から、先行車両や歩行者、自転車など避けるべき障害物を検出するために、様々なフィルターをかけなければならないのだ。不幸なことに、今回のように真横になったトレーラーの側面のような物体は、現在の運転支援システムにおいては、面積が大きすぎて検出の対象外だったのである。
ドライバーが安全確保の最終責任を負っていることを承知のうえで言うのだが、現在の運転支援システムで「システムの状態を絶えず監視し、安全を確保する」というドライバーの義務を果たすことは、じつはそれほど容易なことではない。テスラでいえば、オートパイロットの作動状況はメーター内のディスプレーに表示され、カメラが車線を認識しているかどうか、前方の車両を認識しているかどうか、あるいは隣の車線の車両を認識しているかどうかなどについて、ドライバーは知ることができる。ただし、今回のようなケースで、ドライバーがクルマの動作状況を監視していれば事故を防げたかどうかを考えると、疑問符をつけざるを得ない。

というのも、いくらドライバーに監視の義務があるとはいえ、メーター内のディスプレーと、外の景色を絶えず見比べながら、間違いなくシステ
ムが作動しているかどうかを監視し続けるというのはドライバーにとってかなりの負担であり、現実的ではないからだ。そんなことをするくらいなら、自分で運転するよ、という読者も多いだろう。せっかく運転支援システムに運転を任せているのだから、景色を楽しむ余裕くらいあっていいはずだ、と考えてもばちは当たるまい。となれば、本来はクルマ自身がシステムの限界を自覚し、システムの限界を超える状況になったら、しかるべき余裕を確保したうえで人間にそれを知らせ、人間に運転を明け渡す、というほうが現実的だ。
そのときに人間がスムーズに運転を代わるためには、やはりステアリングから手を離していてはダメで、軽く添えているだけにせよ、手を触れている必要があるだろう。すでにテスラ以外のメーカーの運転支援システムでは、10~15秒程度ステアリングから手を離していると、システムが解除される設定になっている。
これに対して、テスラのオートパイロットは、ステアリングから手を離しても長時間にわたってシステムは解除されない。
(大野意見:わたしは以前、この事故を受けて、同じようにミリ波レーダーが装備されているのに何故作動しなかったのか疑問に思いました。この記事の筆者の意見では、面積の大きなものを認識するアルゴリズムがなかったといっていますが、わたしの意見は違います。多分、誤作動がとても多いので、カメラとミリ波レーダーの双方が障害物と認識して初めて緊急ブレーキが作動するのではないかと思っています。今回2021年9月のミリ波レーダー中止がますますその思いを強くさせています)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
2021年11月現在、いかにも全自動運転できるようにテスラが宣伝しているのも事実です。これを許しておいてはいけないと思います。必ず、良く説明書を読みもせず、運転席に座らずに高速道路を運転させている動画を見ます:
中国での動画ですが、怖いです。




トラックバックURL